
Teoria_
Introdução_
Durante a fase inicial do projeto de controlo de posição angular foi necessário efetuar um estudo teórico sobre esse mesmo tema. Tal estudo tem por objetivo reconhecer o funcionamento de circuitos com essa função, assim como as dificuldades em desenhar e construir um desses circuitos. Disto derivaram várias questões importantes a responder:
1. Que tipo de motor deve ser utilizado?
2. Que tipo de alimentação será apropriada?
3. Quanta desmultiplicação será necessária aplicar no motor?
4. Como ligar o eixo final da desmultiplicação ao eixo do potenciómetro?
5. O que utilizar como suporte a todos os componentes?
6. Qual o limite angular do potenciómetro?
-
O motor a ser utilizado, devido à sua desmultiplicação, será um de 3 V - 0,125 A;
-
Segundo as especificações para este projeto será utilizado uma fonte de alimentação de 10 V. Esta fonte será composta por um transformador simétrico de +12/-12V, que estará contido num circuito de retificação de onda completa, de forma a obter a tensão desejada;
-
Na desmultiplicação do motor foi decidido utilizar um rácio de 1:60 correspondente a um output de 200 RPM;
-
Com os eixos, foi utilizado um adaptador para o eixo final de desmultiplicação, de modo a que ambos os eixos tivessem o mesmo diâmetro. De seguida com utilizado um tubo de plástico justo para ligar ambos os eixos;
-
O suporte utilizado teria que ser fácil de trabalhar e robusto, pelo que foi decidido fazer um suporte de acrílico que tem também a vantagem de ser transparente o proporciona uma boa visualização do projeto;
-
O potenciómetro utilizado contém um alcance de 0 a 270º, no entanto como este está ligado a um motor e para não forçar o seu binário, foi decidido que se iria trabalhar de 0 a 180º.
Diagrama de Controlo de Posição_
De um forma simplificada, o sistema de controlo de posição encontra-se dividido em quatro blocos.
Esses blocos são a referência, o bloco controlo, o motor + desmultiplicação e um sensor.
-
A referência corresponde ao input que é aplicado ao sistema, ou seja, para o caso do controlo de posição, o input será a posição que se deseja atingir;
-
De seguida, o bloco do controlo permitirá fazer o tratamento do sinal, de forma a obter as especificações necessárias. Para este projeto, será apenas necessário implementar a componente proporcional para o controlo;
-
O bloco G, permitirá transformar a tensão tratada no bloco do controlo, num movimento angular do seu eixo. Este movimento apenas será parcialmente aproveitado, devido ao uso de um sistema de desmultiplicação (1:60). Esta desmultiplicação permitirá um controlo mais preciso;
-
Por fim, o sistema será realimentado, ou seja, será necessário utilizar um sensor, bloco H, que irá transformar o movimento do motor numa tensão. Esta tensão será então comparada ao valor de referência de forma a determinar o erro entre a posição de referência e a posição atual. Para tal, será utilizado um potenciómetro que será acoplado ao motor.
Malha Direta_
A partir do diagrama de blocos representado na Figura 2, é possível expandir a malha direta de forma a obter o diagrama representado na Figura 3. Este diagrama representa o bloco P e o bloco G, assim como as transformações que serão efetuadas ao sinal de entrada, de forma a obter o sinal de saída desejado.
Inicialmente é necessário um bloco com um ganho fracionário de 3/10 para transformar um sinal de entrada de 10V num sinal de 3V, mas como o único amplificador operacional que permite ganhos fracionários é o amplificador inversor, este fará com que o ganho não seja 3/10, mas sim -3/10, ou seja, com polaridade inversa.
Para tal será necessário aplicar em série mais um amplificador inversor, este com um ganho de -1, de forma a voltar a inverter a polaridade do sinal e sem alterar o valor do ganho pretendido que seria 3/10.
Embora o sinal ja esteja convertido para o valor desejado, será necessário implementar juntamente com o amplificador anterior, a classe B, ou seja, algo que permite que passe uma corrente de cerca de 1A para o motor, em vez de cerca de 20mA que seria o valor máximo de corrente à saída do amplificador.
Por fim, o sinal já tratado será utilizado para alimentar um motor que irá transformar um sinal elétrico num movimento angular do seu eixo, contudo juntamente com o motor irá ser implementada uma desmultiplicação de 1:60 de forma a reduzir a velocidade de rotação que irá posteriormente ser transferida para outro elemento do circuito.
Malha de Realimentação_
O bloco H, ou realimentação (Figura 4), irá conter um sensor de posição com o objetivo de transformar uma posição angular num certa tensão. O sensor irá receber uma posição angular na gama dos 0 a 180º e posteriormente transformar esse movimento num sinal correspondete de 0 a 10V. Este sinal será então comparado com o input, ou referência, de forma a determinar o erro associado entre a posição desejada e a posição atual. Para efetuar esta etapa do controlo, será utilizado um potenciómetro como sensor de posição.
Potenciómetro_
O sensor que será utilizado na malha realimentada será um potenciómetro (Figura 5). O potenciómetro é um componente que contém uma resistência que varia conforme o ângulo escolhido. Existem potenciómetros com vários valores de resistência, sendo que para este sistema de controlo de posição será utilizado um de 5KΩ. O potenciómetro escolhido opera numa gama de 0 a 270º, mas com o intuito de nunca utilizar os extremos angulares deste, será efetuado um tratamento do sinal de forma a que o potenciómetro apenas opere de 0 a 180º, ou seja entre a posição de 45º e 225º da gama inicial do potenciómetro.
Este tratamento do sinal poderá ser efetuado através de um dos métodos apresentados abaixo.
Método 1_
Este método fará o tratamento do sinal através da análise de um circuito em duas situações distintas. Estas situações serão:
-
Potenciómetro na posição de 0º;
-
Potenciómetro na posição de 180º.
Na Figura 6, é possível visualizar dois circuitos, sendo que o da esquerda corresponde à posição de 0º no potenciómetro, enquanto que o da direita corresponde à posição de 180º no potenciómetro. Para transformar a gama de 0-270º do potenciómetro para uma gama de 0-180º será necessário implementar duas resistências, uma em cada extremidade do potenciómetro, de forma a possibilitar a transformação do sinal. De forma a obter o valor para cada uma das resistências, será necessário definir uma equação para a tensão em cada situação (0º, 180º). As equações em questão são obtidas através do divisor de tensão para cada uma.
A tensão no circuito acima poderá ser representada da forma abaixo indicada, de forma a simplificar os cálculos.
Após o cálculo foi então feita a simulação do circuito em cada uma das situações de forma a determinar a tensão máxima à saída do circuito.
Esta simulação pode ser visualizada na parte da presente no website.
Método 2_
Embora o método seja eficaz, será também demonstrado outro método de tratamento do sinal para transformar a gama de 0-270º do potenciómetro, num da 0-180º, sendo que a tensão necessária à saída será de 0-10V.
Inicialmente será necessário determinar o valor da tensão para as posições de 45º e 225º, que posteriormente corresponderão às posições 0º e 180º respetivamente, na nova escala. Estas tensões são determinadas da seguinte forma, sendo o potenciómetro alimentado por uma tensão de 12V:
V(45º) _______ 45º (0º na nova gama)
12V _______ 270º Logo, V(45º) = 2V
V(225º) _______ 225º (180º nova gama)
12V _______ 270º Logo, V(225º) = 10V
De seguida, será necessário representar graficamente o sinal da tensão à saída do potenciómetro, conforme a posição (0º ou 180º):
No Gráfico 1, é possível visualizar a tensão à saída do potenciómetro, sendo então agora necessário efetuar alterações ao sinal. Para tal, será aplicado uma tensão no sentido inverso de 2V, de forma que a tensão para a posição 0º seja também de 0V. Esta alteração também terá efeito para todas as posições do potenciómetro, daí a tensão para a posição 180º seja agora 2V inferior à inicial de 10V.
No Gráfico 2, é possível visualizar as alterações efetuadas acima, sendo a tensão na posição 0º de 0V, assim como a tensão na posição 180º de 8V. Dado que as especificações implicam que a tensão à saída do potenciómetro varie de 0-10V, será necessário aplicar mais uma alteração ao sinal. Esta alteração será a multiplicação do sinal, por um ganho de 10/8, de forma a transformar o sinal de 0-8V, num sinal de 0-10V.
Esta alteração pode ser visualizada no Gráfico 3, abaixo representado.

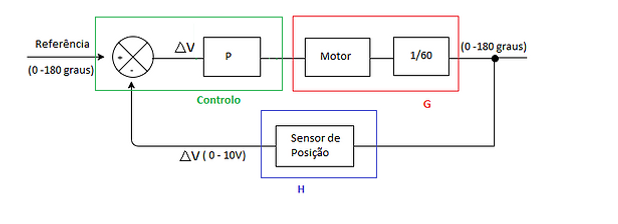

Figura 1 - Diagrama de blocos de um sistema realimentado
Figura 2 - Diagrama de blocos de um sistema de controlo de posição angular
Figura 3 - Diagrama da malha direta do circuito
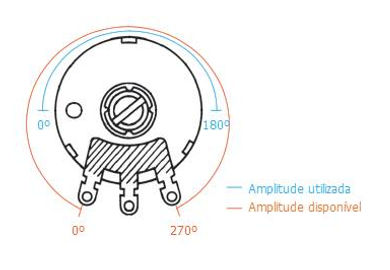
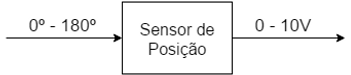
Figura 4 - Diagrama da malha realimentada do circuito
Figura 5 - Representação das posições angulares do potenciómetro
Figura 6 - Representação do circuito para retificação angular do potenciómetro

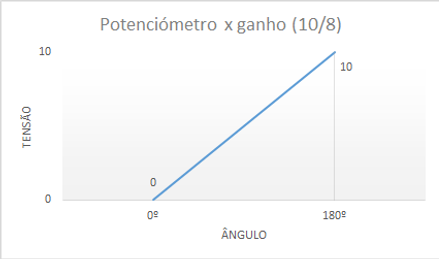
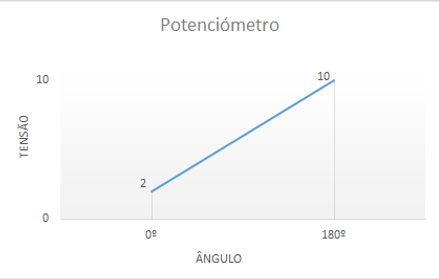
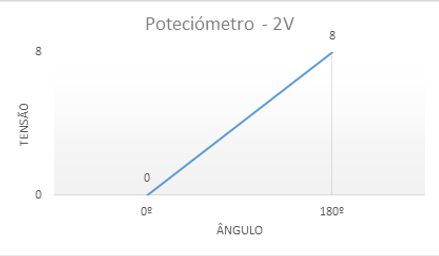
Gráfico 1 - Representação da tensão à saída do potenciómetro
Gráfico 2 - Representação da tensão à saída do potenciómetro após a subtração de 2V
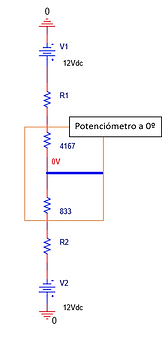

Gráfico 3 - Representação da tensão à saída do potenciómetro após um ganho de 10/8